手術というと人がメスなどを用いて患部(腫瘍)を切除するイメージですが、
アメリカのインテュイティブ・サージカル社の「ダヴィンチ=da Vinci Surgical System」 という手術を「支援」するために開発されたロボットがあります。自動的に手術を行ってくれるわけではなく、実際には医師が操作し 拡大した視野の下で、人の手よりも正確で細かい動きが可能 となります。
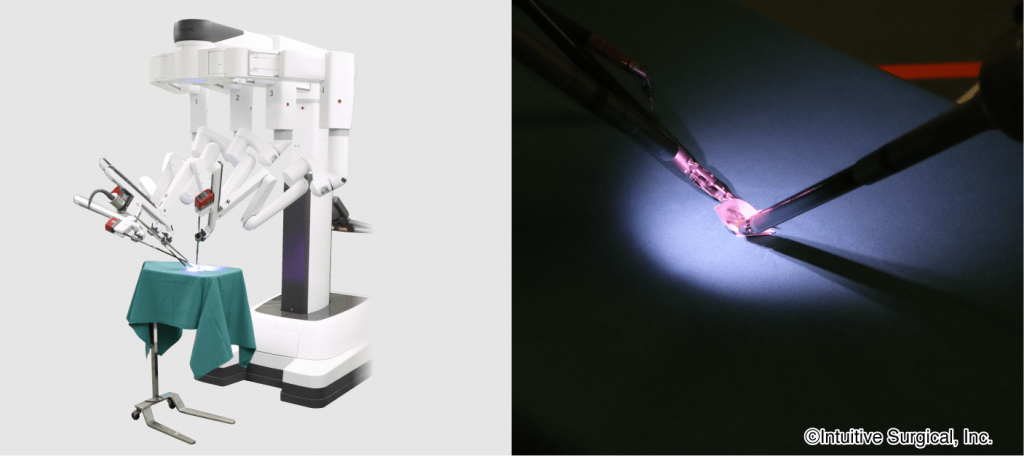
ダヴィンチが支援するのは腹腔鏡手術( 視鏡を腹腔内に挿入し、テレビモニター上に映し出された映像を見ながらの手術 )です。そのために3つの装置がセットになっています。
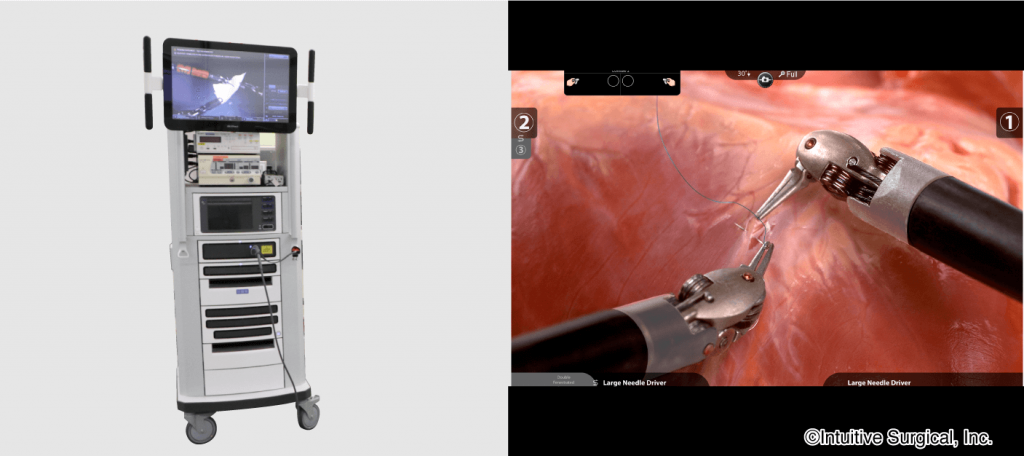
1つ目の装置は、医師が操作するロボットアームがある「ペイシャントカート」です。2つ目は、医師が着席して操作を行う「サージョンコンソール」。3つ目は手術をサポートするスタッフのためのモニターがついた「ビジョンカート」です。
医師がサージョンコンソールに着席して、ロボットアームの操作を行い、ペイシャントカートが4本のロボットアームで内視鏡や鉗子などを駆使して手術を行います。 他の看護師がビジョンカートの内視鏡カメラの映像を確認することで手術状況を共有・確認することができます。

インテュイティブ社はこうしたダヴィンチの基本的な動きやアームの関節のデザインなどの特許を数百種類押さえているとされ、競合の「後追い」をけん制してきました。
これまで世界市場を席巻してきたアメリカのインテュイティブ・サージカル社の「ダヴィンチ=da Vinci Surgical System」の特許の多くが2019年に満了となったことで、さまざまな手術支援ロボットの開発が世界中で進んでいます。
特許が壁となって今まで実用的なロボットを開発できなかった会社もダヴィンチの後を追います。以下が主な手術ロボットメーカーの一覧です。
| インテュイティブ・サージカル | 米国 | ダヴィンチ |
| アキュレイ | 米国 | 放射線治療ロボット |
| ストライカー | 米国 | 小型の整形外科手術用ロボット |
| ハンセンメディカル | 米国 | 心血管カテーテルロボット |
| CMRサージカル | 英国 | 小型の単アームロボット |
| メドトロニック | アイルランド | 小型の脊椎手術用ロボット |
| アヴァテラメディカル | ドイツ | 4本腕のロボット |
| メディカロイド | 日本 | 多アーム型ロボット |
| エー・トラクション | 日本 | 手術器具の操作補助ロボット |
| リバーフィールド | 日本 | 空気圧で動くロボット |
遠隔手術
2月22日には、国内初の遠隔手術を青森で実証実験しました。青森県の弘前大学(弘前市)から約150キロ離れたむつ総合病院 に設置したロボット本体を操作して模擬手術を行ういました。
遠隔操作での速度の遅延は極めて少なく遅延は約100ミリ秒(ミリ秒は1千分の1秒)程度で多くの手術をするのに問題はない程度だそうです。
これで、地方にはロボットを導入して都市部の優秀な医者による手術が実現可能になりそうだと思いました。しかし、果たして一台 5000万円 ほどするロボットを地域の病院に導入できるのか、国が補助することで導入が進められていくのか気になりました。
また、実証実験では遠隔操作での遅延が少なかったですが、ネット環境に不具合がおき、手術途中でロボットが動作しなくなった場合に発生する医療のミスの責任は、病院・医師なのかロボット開発会社なのかインターネット回線の業者なのか気になりました。
名古屋大学医学部事件(2010年)
ロボット医療における医療事故の危険が現実化してしまった事件として、2010年に名古屋大学医学部付属病院で発生した、腹腔鏡下手術支援ロボット「ダヴィンチ」(※)を利用した胃切除手術における死亡事故がありました。
執刀医がロボット鉗子は扱い方次第で過度の力がかかる危険性があるという“使用機器の特性を十分理解”できていなかった点にあると結論づけられました(担当医の知識・能力が不足していたことによる「過失」)。
執刀医は「ダヴィンチ」のトレーニングコースを履修しており、通常の内視鏡手術の経験も豊富であったものの、「ダヴィンチ」経験医を招聘せずに独自に手術を実施したことについては、病院のシステム的な問題があったともされました(ロボット技術を導入するにあたっての病院組織の「過失」)。
刑事上の責任は問われておらず、おそらくは病院が遺族の方に対して民事上の損害賠償を行ったそうです。
コメント